Stepper
With Arduino.
Stepper:
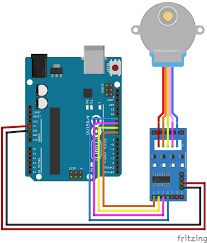
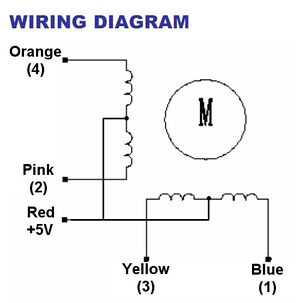
Unipolar Stepper Motor
There are 5 wires. The red wire is the positive power input and should be connected to 5V.
Stepper motors comes with specifications as shown below. Few important ones are:
Voltage, Phase, torque, Angle

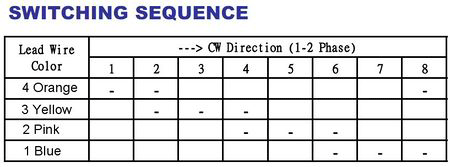
There are 8 different steps (these 8 steps is one step loop) for the stepper to move forward. Every step will make the shaft rotate with an angle of 5.625/64 degree.So if we want the shaft to revolve one circle, then the step loops we should make is 360/(8*5.625/64)=512(step loops).
5.625/64 is the stride angle that comes from the stepper specification
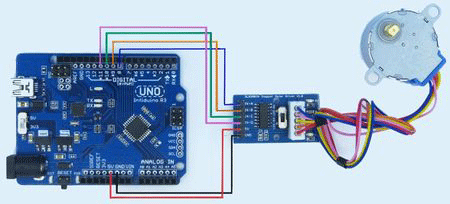
The Stepper motor needs a module which is basically a motor driver. The following diagram shows the wiring using a UNO board
/*
One revolution of Unipolar stepper motor.
Using digital pins 8 - 11 of Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
*/
void setup() {
// initialize the digital pin as an output.
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
}
void loop() {
int i=0;
//revolve one revolution clockwise
for(i=0;i<512;i++){
clockwiserotate();}
delay(1000); // wait for a second
//revolve one revolution counterclockwise
for(i=0;i<512;i++){
counterclockwiserotate();}
delay(1000); // wait for a second
}
void clockwiserotate() { //revolve clockwise
step1();
step2();
step3();
step4();
step5();
step6();
step7();
step8();
}
void counterclockwiserotate() { //revolve counterclockwise
step1();
step7();
step6();
step5();
step4();
step3();
step2();
step1();
}
void step1(){
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
delay(2);
}
void step2(){
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
delay(2);
}
void step3(){
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
delay(2);
}
void step4(){
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
delay(2);
}
void step5(){
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
delay(2);
}
void step6(){
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, HIGH);
digitalWrite(11, HIGH);
delay(2);
}
void step7(){
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, HIGH);
delay(2);
}
void step8(){
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, HIGH);
delay(2);
}